캘리퍼스란?
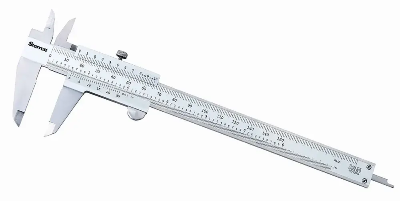
캘리퍼스는 작은 물건의 지름,너비 등을 측정할 때 쓰는 도구로 두개의 평형한 변 사이의 길이를 측정하는 도구이다.
회전하는 캘리퍼스(Rotating Calipers) 알고리즘이란?
회전하는 캘리퍼스 알고리즘은 실제 볼록 다각형의 지름을 재는데 사용된다.
다각형을 따라 두 직선을 한바퀴 돌리면서 두 직선에 닿는 꼭지점들 간의 거리를 구하는 알고리즘이다.
백준 10254번 고속도로 문제를 기준으로 살펴 보자
https://www.acmicpc.net/problem/10254
10254번: 고속도로
n개의 도시를 가진 나라가 있다. 이 나라에서는 도시들 중 가장 먼 두 도시 사이에 직행 고속도로를 놓으려 한다. 고속도로는 시작점과 끝점이 아닌 다른 나라를 통과해도 된다. 즉, n개의 도시
www.acmicpc.net
Convex Hull 알고리즘으로 볼록 다각형 테두리를 찾아낸 후 각 꼭지점에서 가장 먼 거리를 측정하는 문제이다.
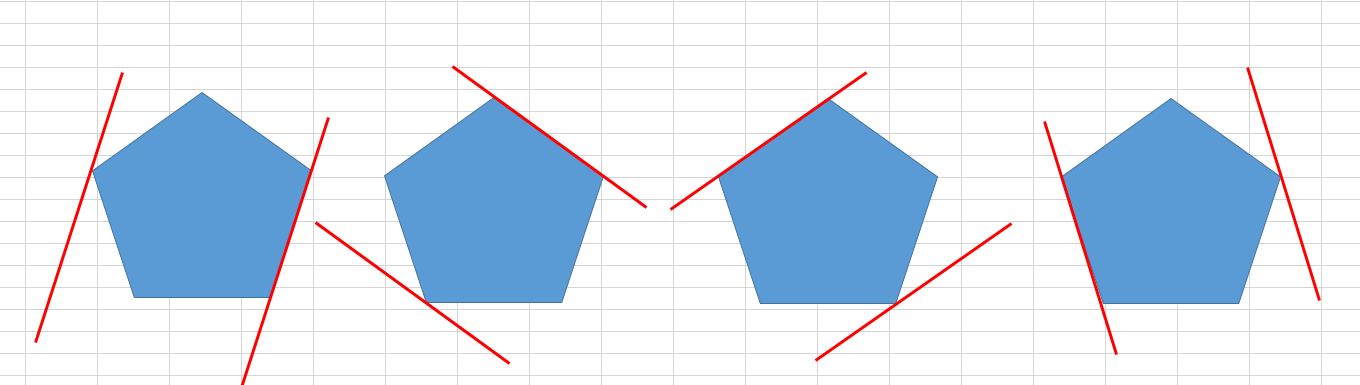
위와 같이 한변을 기준으로 회전 하면서 가장 먼 거리를 찾아 주면 된다.
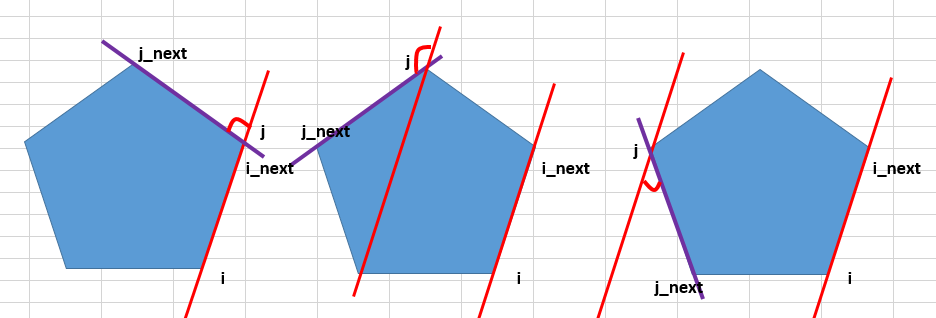
기준점이 되는 한변을 선택 한다면(i와 i_next) 위와 같이 다른 선분을(j와 j_next)를 진행 하면서 위의 j와 j_next 부분에서는 멈추면 된다는 것을 알 수 있다.
i에서 i_next 와 j에서 j_next의 ccw 가 반시계 방향이라면 거리가 늘어 나지만 시계방향으로 바뀐다면 그 거리가 짧아 지는 것을 확인 할 수 있다.
따라서 각 i 점에서 위와 같이 ccw 를 구하여 시계방향의 위치에서 최장거리의 후보군으로 선택하는 알고리즘이다.
따라서 위의 문제는 다음과 같이 해결 할수 있다.
#include <iostream>
#include <cstdio>
#include <algorithm>
#include <stack>
#define INF 987654321987654321L
using namespace std;
struct Point {
long long x, y;
long long p, q;
bool operator < (const struct Point &r) const{
if (q * r.p != p*r.q)
return q * r.p < p*r.q;
//기울기가 같을때는 좌표값으로 정렬하자.
if (y != r.y)
return y < r.y;
return x < r.x;
}
};
/*
두개의 선분 이 다음과 같다고 하면
line 1 : (x1,y1) (x2,y2)
line 2 : (x3,y3) (x4,y4)
교차하지 않는 경우는 다음과 같다.
-dot3과 dot4가 모두 line1의 왼쪽에 있는 경우
-dot3과 dot4가 모두 line1의 오른쪽에 있는 경우
-dot1과 dot2가 모두 line2의 왼쪽에 있는 경우
-dot1과 dot2가 모두 line2의 오른쪽에 있는 경우
(x1,y1) (x2,y2) 의 기울기를 구하는 방정식 y증가량 / x증가량
기울기 a = (y2-y1) / (x2-x1)
(x3,y3) 이 오른쪽에 있는지 왼쪽에 있는지 구분하기 위해서는
(x1,y1) (x3,y3) 의 기울기를 구해서 기울기가 작은지 큰지를 구분하면 된다.
(y2-y1) / (x2-x1) - (y3-y1) / (x3-x1) > 0 이면 (x3,y3) 이 오른쪽에 있는 것이다.
이때 line 의 기울기가 음수일때는 왼쪽 오른쪽의 위치가 반대이다.
그리고 분모가 0 인경우 문제가 발생한다.
따라서 분모를 없애자...
(y2-y1)(x3-x1) - (y3-y1)(x2-x1) > 0 이면 오른쪽 <0 이면 왼쪽 ==0 이면 같다.
이렇게 하면 음수인 경우도 해결이 됨. 음수를 곱하면 부등호도 반대가 됨으로
*/
long long ccw(const Point &A, const Point &B, const Point &C) {
return A.x * B.y + B.x * C.y + C.x * A.y - B.x * A.y - C.x * B.y - A.x * C.y;
}
long long ptoplen(const Point &A,const Point &B){
return (B.x-A.x)*(B.x-A.x) + (B.y-A.y)*(B.y-A.y);
}
Point p[200010];
int main() {
cin.tie(0);
cout.tie(0);
ios::sync_with_stdio(0);
int t;
cin >> t;
while(t--){
long long miny=INF;
long long minx=INF;
long long minindex=-1;
long long maxlen = 0;
int n;
cin >> n;
for (int i = 0; i < n; i++) {
int x, y;
cin >> x >> y;
p[i].x=x;
p[i].y=y;
if(miny > y)
{
miny = y;
minx = x;
minindex=i;
}
else if(miny==y)
{
if(minx>x)
{
miny = y;
minx = x;
minindex=i;
}
}
}
swap(p[0],p[minindex]); //y가 가장 작은 값을 0번지에 넣자.
//sort(p, p + n, comp1);
// 기준점으로부터 상대 위치 계산
for (int i = 1; i < n; i++) {
p[i].p = p[i].x - p[0].x;
p[i].q = p[i].y - p[0].y;
}
// 반시계 방향으로 정렬(기준점 제외)
sort(p + 1, p + n);
stack<int> s;
// 스택에 first, second를 넣어준다.
s.push(0);
s.push(1);
int next = 2;
while (next < n) {
while (s.size() >= 2) {
int first, second;
second = s.top();
s.pop();
first = s.top();
// first, second, next가 좌회전 ( > 0 )이라면 second push
// 우회전( < 0 )이라면 위의 while문 계속 반복
if (ccw(p[first], p[second], p[next]) > 0) {
s.push(second);
break;
}
}
// next push
s.push(next++);
}
/* 여기 까지는 Convex Hull 로 볼록 다각형을 찾아냄 */
//볼록 다각형의 정점만 모으자.
vector<Point> convexHull;
Point ans1,ans2;
while(!s.empty()){
convexHull.push_back(p[s.top()]);
s.pop();
}
int j=1;
for(int i=0;i<convexHull.size();i++){
int i_next = (i+1) % convexHull.size();
while(1){
int j_next = (j+1)%convexHull.size();
Point temp = {0,0,0,0};
Point point_i,point_j;
point_i.x = convexHull[i_next].x - convexHull[i].x;
point_i.y = convexHull[i_next].y - convexHull[i].y;
point_j.x = convexHull[j_next].x - convexHull[j].x;
point_j.y = convexHull[j_next].y - convexHull[j].y;
if(ccw(temp,point_i,point_j)<0) j=j_next;
else break;
}
long long len = ptoplen(convexHull[i],convexHull[j]);
if(len > maxlen){
maxlen = len;
ans1 = convexHull[i];
ans2 = convexHull[j];
}
}
cout << ans1.x << " " << ans1.y << " " << ans2.x << " " << ans2.y << "\n";
}
return 0;
}
사업자 정보 표시
원당컴퓨터학원 | 기희경 | 인천 서구 당하동 1028-2 장원프라자 502호 | 사업자 등록번호 : 301-96-83080 | TEL : 032-565-5497 | Mail : icon001@naver.com | 통신판매신고번호 : 호 | 사이버몰의 이용약관 바로가기
'강의자료 > 알고리즘' 카테고리의 다른 글
| 알고리즘] 최소 절단 (43) | 2023.11.24 |
|---|---|
| inchworm 알고리즘 (29) | 2023.11.13 |
| [알고리즘]다익스트라(Dijkstra) 알고리즘 (9) | 2023.03.16 |
| [알고리즘] Floyd-Warshall(플로이드워셜) 알고리즘 (14) | 2023.03.09 |
| [알고리즘] 크루스칼알고리즘 (12) | 2023.02.23 |